归档/v6/Rule:感知
出自Meshal Lite
(修订版本间的差异)
(→感知) |
(→感知手段) |
||
| 第74行: | 第74行: | ||
---- | ---- | ||
听觉是通过声响和音量感知的方法. 听觉会受到[[障碍]]和其他生物的干扰, 降低有效感知距离. | 听觉是通过声响和音量感知的方法. 听觉会受到[[障碍]]和其他生物的干扰, 降低有效感知距离. | ||
| − | *若未特别说明, 听觉的[[#锁定距离|锁定距离]]为30[[步]], [[#察觉距离|察觉距离]] | + | *若未特别说明, 听觉的[[#锁定距离|锁定距离]]为30[[步]], [[#察觉距离|察觉距离]]为90[[步]]. |
*'''[[#死角|死角]]''': 通常, 听觉并没有严格的死角. 但静止的目标难以被听觉感知到 -- 若在1[[轮]]中某个目标未曾做出过任何[[行动]], 那么无法被听觉感知到. | *'''[[#死角|死角]]''': 通常, 听觉并没有严格的死角. 但静止的目标难以被听觉感知到 -- 若在1[[轮]]中某个目标未曾做出过任何[[行动]], 那么无法被听觉感知到. | ||
*任何目标只要在1[[轮]]中做出过[[行动]], 那么就会被听觉捕捉到位置. 在检查1个目标是否可被感知到时, 你与目标之间每隔1[[步]]厚(不足1[[步]]视同1[[步]])的[[障碍]], [[#锁定距离|锁定距离]]和[[#察觉距离|察觉距离]]就会降低一半; 同样地, 你与目标之间每有1个[[体型]]与目标相仿(相同, 大1级或小1级)的生物, [[#锁定距离|锁定距离]]和[[#察觉距离|察觉距离]]也会降低一半. 如果经此降低后目标仍在你的[[#察觉距离|察觉距离]]内, 那么你就能[[#察觉|察觉]]到该目标; 同理, 若目标依旧在降低后的[[#锁定距离|锁定距离]]内, 你就能[[#锁定|锁定]]该目标. | *任何目标只要在1[[轮]]中做出过[[行动]], 那么就会被听觉捕捉到位置. 在检查1个目标是否可被感知到时, 你与目标之间每隔1[[步]]厚(不足1[[步]]视同1[[步]])的[[障碍]], [[#锁定距离|锁定距离]]和[[#察觉距离|察觉距离]]就会降低一半; 同样地, 你与目标之间每有1个[[体型]]与目标相仿(相同, 大1级或小1级)的生物, [[#锁定距离|锁定距离]]和[[#察觉距离|察觉距离]]也会降低一半. 如果经此降低后目标仍在你的[[#察觉距离|察觉距离]]内, 那么你就能[[#察觉|察觉]]到该目标; 同理, 若目标依旧在降低后的[[#锁定距离|锁定距离]]内, 你就能[[#锁定|锁定]]该目标. | ||
| 第87行: | 第87行: | ||
---- | ---- | ||
嗅觉是通过空气流动和气味感知的方法. 嗅觉会受到[[障碍]]和其他生物的干扰, 降低有效感知的距离. | 嗅觉是通过空气流动和气味感知的方法. 嗅觉会受到[[障碍]]和其他生物的干扰, 降低有效感知的距离. | ||
| − | *若未特别说明, 嗅觉的[[#锁定距离|锁定距离]]为30[[步]], [[#察觉距离|察觉距离]] | + | *若未特别说明, 嗅觉的[[#锁定距离|锁定距离]]为30[[步]], [[#察觉距离|察觉距离]]为90[[步]]. |
*'''[[#死角|死角]]''': 通常, 嗅觉并没有严格的死角. | *'''[[#死角|死角]]''': 通常, 嗅觉并没有严格的死角. | ||
*嗅觉会受到[[障碍]]和其他生物的气味干扰: 你与目标之间每隔1处[[障碍]](无论厚薄), [[#锁定距离|锁定距离]]和[[#察觉距离|察觉距离]]就会降低一半; 将你与目标的距离作为半径, 在此范围之内每有1个生物, 你的[[#锁定距离|锁定距离]]就减少1[[步]], [[#察觉距离|察觉距离]]则减少10[[步]]. 如果经此降低后目标仍在你的[[#察觉距离|察觉距离]]内, 那么你就能[[#察觉|察觉]]到该目标; 同理, 若目标依旧在降低后的[[#锁定距离|锁定距离]]内, 你就能[[#锁定|锁定]]该目标. | *嗅觉会受到[[障碍]]和其他生物的气味干扰: 你与目标之间每隔1处[[障碍]](无论厚薄), [[#锁定距离|锁定距离]]和[[#察觉距离|察觉距离]]就会降低一半; 将你与目标的距离作为半径, 在此范围之内每有1个生物, 你的[[#锁定距离|锁定距离]]就减少1[[步]], [[#察觉距离|察觉距离]]则减少10[[步]]. 如果经此降低后目标仍在你的[[#察觉距离|察觉距离]]内, 那么你就能[[#察觉|察觉]]到该目标; 同理, 若目标依旧在降低后的[[#锁定距离|锁定距离]]内, 你就能[[#锁定|锁定]]该目标. | ||
| 第100行: | 第100行: | ||
---- | ---- | ||
震感是通过物体振动感知的方法. 震感会受到[[障碍]]和其他生物的干扰, 降低有效感知的距离. | 震感是通过物体振动感知的方法. 震感会受到[[障碍]]和其他生物的干扰, 降低有效感知的距离. | ||
| − | *若未特别说明, 震感的[[#锁定距离|锁定距离]]为30[[步]], [[#察觉距离|察觉距离]] | + | *若未特别说明, 震感的[[#锁定距离|锁定距离]]为30[[步]], [[#察觉距离|察觉距离]]为90[[步]]. |
*'''[[#死角|死角]]''': 通常, 震感并没有严格的死角, 但若你或目标没有接触传递振动的介质(比如悬浮在空中), 或目标在1[[轮]]内未作出过任何[[行动]], 那么就无法被震感感知到. | *'''[[#死角|死角]]''': 通常, 震感并没有严格的死角, 但若你或目标没有接触传递振动的介质(比如悬浮在空中), 或目标在1[[轮]]内未作出过任何[[行动]], 那么就无法被震感感知到. | ||
*若你与目标之间有传递振动的介质(比如立于同一块地面, 或处于同一片水域), 只要目标在1[[轮]]中做出过[[行动]], 那么就会被震感捕捉到位置. 在检查1个目标可否感知到时, 你与目标之间每有1个[[体型]]与目标相仿(相同, 大1级或小1级)的生物, [[#锁定距离|锁定距离]]和[[#察觉距离|察觉距离]]也会降低一半. 如果经此降低后目标仍在你的[[#察觉距离|察觉距离]]内, 那么你就能[[#察觉|察觉]]到该目标; 同理, 若目标仍在降低后的[[#锁定距离|锁定距离]]内, 你就能[[#锁定|锁定]]该目标. | *若你与目标之间有传递振动的介质(比如立于同一块地面, 或处于同一片水域), 只要目标在1[[轮]]中做出过[[行动]], 那么就会被震感捕捉到位置. 在检查1个目标可否感知到时, 你与目标之间每有1个[[体型]]与目标相仿(相同, 大1级或小1级)的生物, [[#锁定距离|锁定距离]]和[[#察觉距离|察觉距离]]也会降低一半. 如果经此降低后目标仍在你的[[#察觉距离|察觉距离]]内, 那么你就能[[#察觉|察觉]]到该目标; 同理, 若目标仍在降低后的[[#锁定距离|锁定距离]]内, 你就能[[#锁定|锁定]]该目标. | ||
在2015年10月18日 (日) 13:39所做的修订版本
目录 |
感知
感知是认知世界的手段, 在战斗中, 敏锐的感知可使你洞察战场, 料敌先机. 常见的感知手段有: 视觉, 听觉, 嗅觉, 震感和超感.
|
|
主要感知 模板:Cap 通常来说, 每种生物都会依赖1种感知手段作为认知世界的主要方式, 你总是习惯于依赖这种感知手段 -- 当该手段被意外剥夺时, 你会茫然无措, 难以适应. |
|
|
锁定 模板:Cap 锁定是指你能够清晰地分辨目标的远近和轮廓. 若你能锁定目标, 这表示你已经精确地感知到了目标的位置和身形. 你能对之做出精确的攻击或准确地施展能力.
|
|
|
察觉 模板:Cap 察觉是指你意识到了某个目标的大致方位和距离, 但却不能精确地锁定目标. 比如眺望远处的身影, 发现拐角处埋伏的敌人, 或藏于暗处的陷阱. |
|
|
不察 或无法感知 模板:Cap 有时候你可能完全无法感知到目标: 位于极远处的敌人, 隐藏在你感知死角的敌人, 与你有一墙之隔的机关等. |
感知手段
|
|
视觉 模板:Cap 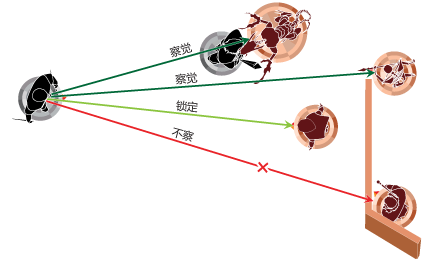 视觉是通过可见光, 影像等现象进行感知的方法. 在判断1个目标是否可以用视觉感知到时, 你需要进行视线检查.
|
|
|
听觉 模板:Cap 听觉是通过声响和音量感知的方法. 听觉会受到障碍和其他生物的干扰, 降低有效感知距离.
|
|
|
嗅觉 模板:Cap 嗅觉是通过空气流动和气味感知的方法. 嗅觉会受到障碍和其他生物的干扰, 降低有效感知的距离.
|
|
|
震感 模板:Cap 震感是通过物体振动感知的方法. 震感会受到障碍和其他生物的干扰, 降低有效感知的距离.
|
|
|
超感 模板:Cap 超感是通过超自然力量, 预知力或心电感应等感知的方法. |